SM300 built around a real full-scale prototype.
A cargo VTOL platform in advanced development, designed for long-range missions, meaningful payload, and practical operational deployment.
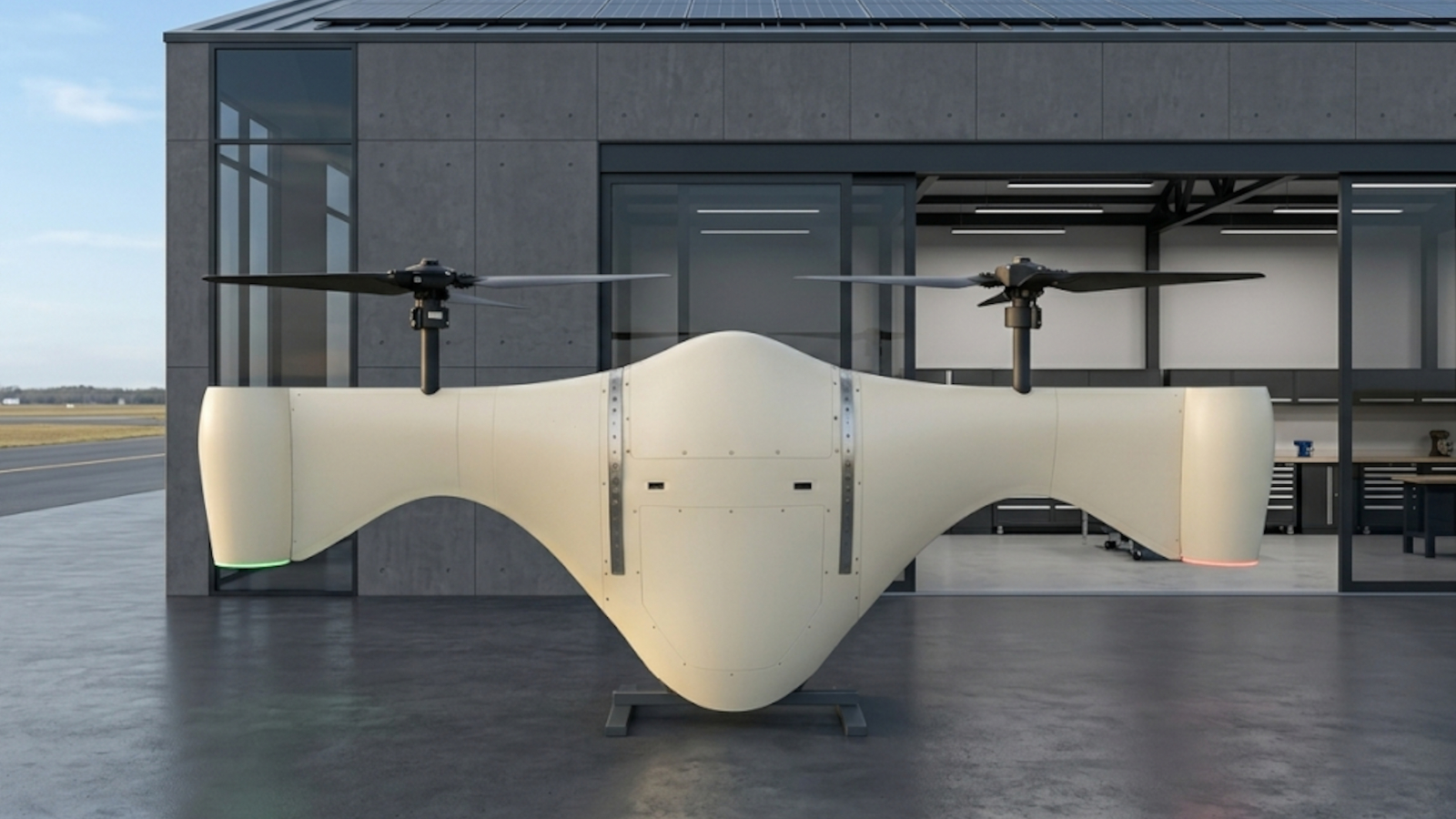
A full-scale cargo VTOL platform.


A physical prototype, not only a concept.
Modular architecture for configurable missions.
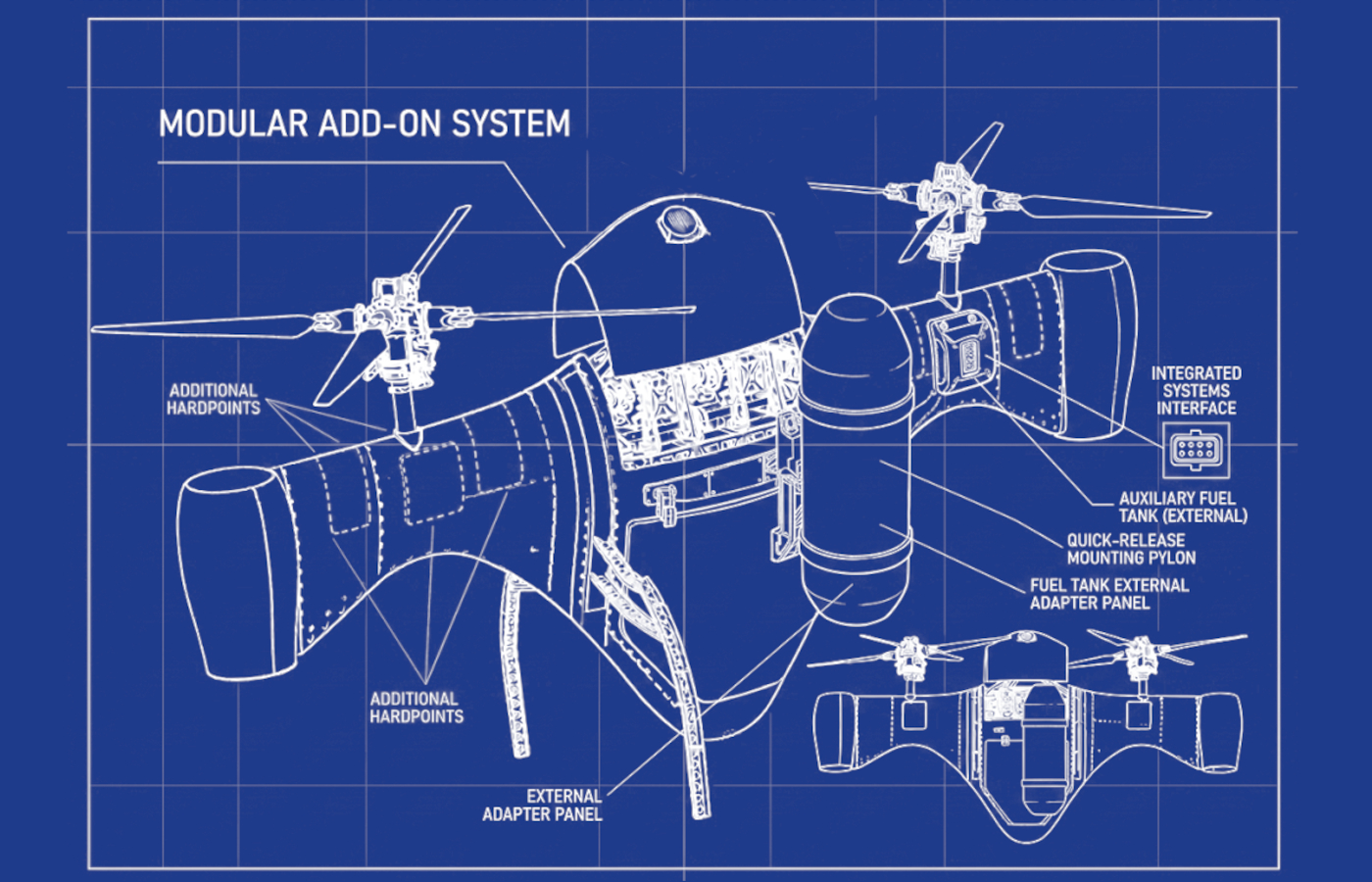
Designed for demanding missions.

Logistics
Cargo transport for routes where helicopter operating costs are difficult to justify.

Offshore
Long-distance payload delivery and support missions to remote locations.

Border monitoring
Persistent aerial presence for surveillance, patrol, and infrastructure observation.

Emergency response
Rapid deployment of equipment and mission support in time-critical situations.
From concept to exhibition-ready prototype.
Initial concept and early configuration work.
Prototype iterations and subsystem development.
Full-scale assembly and integration.
Airframe refinement and mission architecture.
Exhibition preparation and next validation stage.
Partnerships, technical discussions, and project updates.
Start working with SM300
Join early partners evaluating heavy-lift VTOL capabilities for logistics, offshore operations, and mission-critical deployments.